LeRobot + Strands : du Hub IA à ton robot en 5 lignes
Pourquoi ça compte pour toi
Tu peux maintenant passer de la démo à la prod sans jongler entre 5 outils différents. Strands fusionne enregistrement, simulation, déploiement et coordination de flotte en un seul workflow. C'est utile si tu explores la robotique sans GPU ou hardware coûteux : teste tout en local, déploie quand c'est prêt.
Ce qu'il faut retenir
- 1.Même format de dataset en simulation et sur hardware : zéro conversion, zéro friction
- 2.Code identique pour sim et robot réel : change juste mode='real' vs 'sim'
- 3.Coordonne plusieurs robots via une mesh Zenoh intégrée
- 4.Fonctionne sans GPU, sans identifiants Hugging Face, avec MuJoCo local
Tu galères avec le jargon ?
Lis la version réécrite en mode débutant — toutes les idées, sans le jargon.
Le problème : 5 outils, zéro cohésion
Jusqu'à présent, faire bosser un robot, c'était : enregistrer une démo (outil 1), entraîner un modèle (outil 2), tester en simulation (outil 3), coder le déploiement hardware (outil 4), orchestrer plusieurs robots (outil 5). Chacun parlait sa langue. Les datasets changeaient de format. Les pips explosaient.
La solution : une seule boucle agent
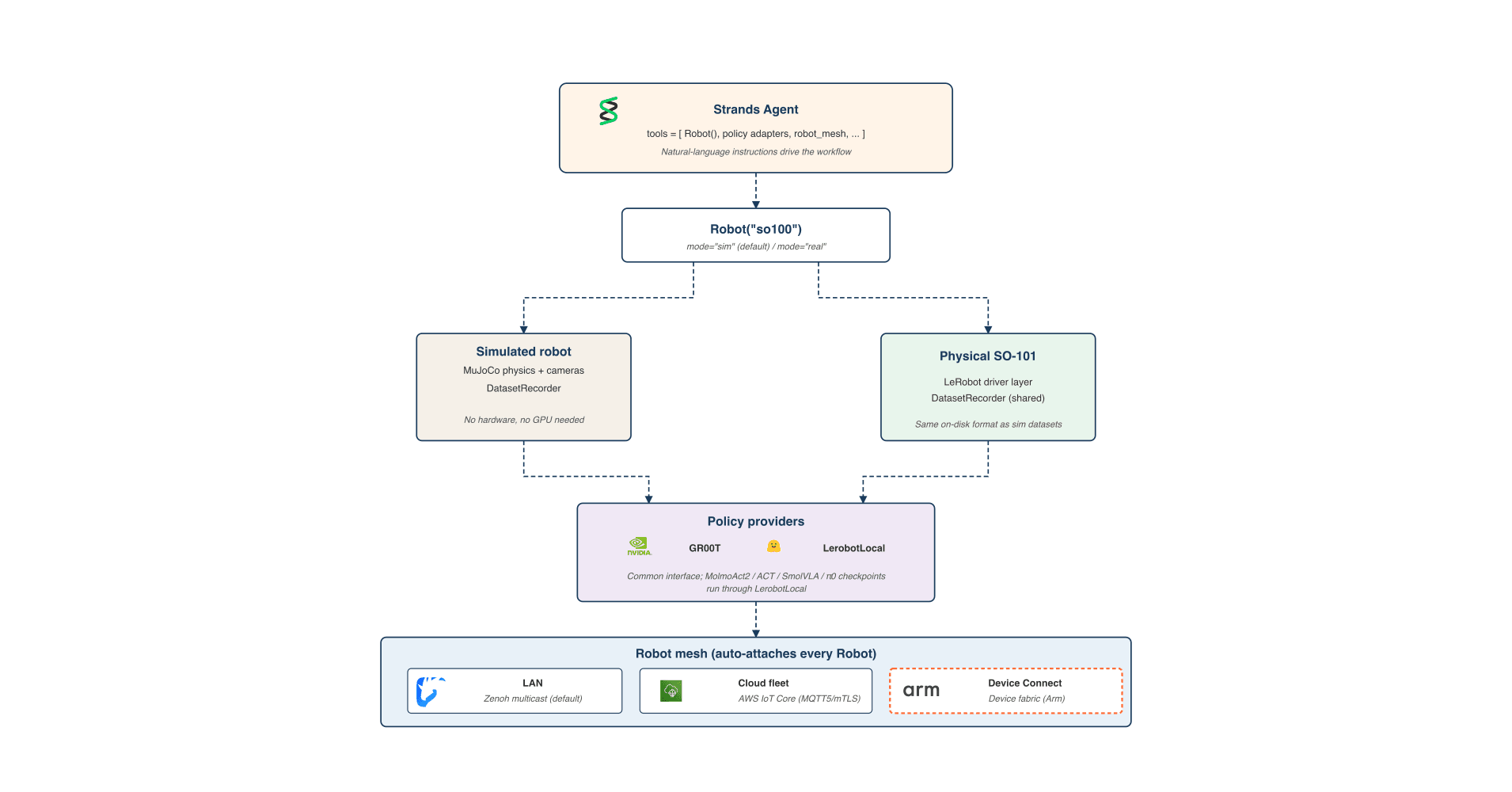
Strands (SDK open source d'AWS, Apache 2.0) expose LeRobot comme des AgentTools que tu composes. Concrètement :
from strands_robots import Robot
from strands import Agent
arm = Robot("so100") # sim par défaut
agent = Agent(tools=[arm])
agent("Pick up the red cube")
C'est tout. Voilà ce qu'il y a dedans.
Étape 1 : enregistrer en simulation
Le Robot tourne sur MuJoCo par défaut. Quand tu dis à l'agent d'enregistrer, le DatasetRecorder écrit exactement le même format parquet que LeRobot sur hardware : états des joints, actions, vidéos MP4 caméra par caméra.
Ce format partagé est central. Une démo capturée en simulation et une sur le SO-101 physique sont byte-for-byte compatibles. Zéro conversion.
Étape 2 : pousser sur le Hub
L'agent envoie le dataset LeRobotDataset directement à Hugging Face (pas obligatoire pour la démo).
Étape 3 : tourner une policy en sim
Tu remplaces le policy provider avec un string : GR00T, LerobotLocal (MolmoAct2), ou Mock. Le code reste identique.
Étape 4 : déployer sur hardware
Change un argument :
arm = Robot("so100", mode="real")
Le reste du code ne bouge pas. Les CLIs de calibration de LeRobot gèrent la mise en place du hardware ; l'agent pilote depuis là.
Étape 5 : coordonner une flotte
La mesh Zenoh intégrée distribue les commandes sur plusieurs robots. Pas d'infrastructure personnalisée.
Points techniques
- ▸Prérequis minimal : Python 3.12+, Linux/macOS, un fournisseur de modèles (Ollama local, Bedrock, Anthropic API, OpenAI).
- ▸Pour hardware : SO-101 pair, fichiers de calibration, optionnellement GPU 16GB pour GR00T local.
- ▸Le notebook tourne de bout en bout sans GPU, sans identifiants Hub, avec la Mock policy.
- ▸Les checkpoints MolmoAct2 sont auto-détectés via config.json et routés par LerobotLocal.
Pourquoi ça compte
Cette intégration résout deux problèmes d'un coup : elle réduit la friction (un workflow au lieu de cinq) et elle standardise le format des données. Si tu construis des outils robotiques, tu n'auras plus à demander aux utilisateurs "dans quel format tu veux les démos ?". C'est LeRobotDataset.
L'architecture est intentionnellement légère : LeRobot garde ses CLIs pour l'enregistrement et la calibration ; Strands orchestre. Chaque composant reste interchangeable.
Et concrètement pour toi ?
Choisis ton profil — la lecture de l'article change selon qui tu es.
Pour toi, comprends que la robotique devient accessible : avant, il fallait du matériel expensive et des experts. Maintenant, une personne avec des bases de code peut entraîner un robot en simulation et le déployer en quelques heures.
Essayer maintenant
Cloner le repo et tourner l'exemple en simulation →Source
Pour aller plus loin
Cet article t'a donné envie d'approfondir ? Deux formations Noésis t'attendent :
Explorer les thèmes de cet article :